
Abstract
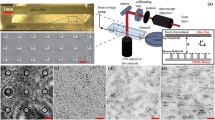
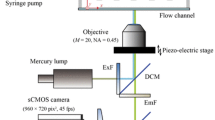
A new optical sensor technique based on a sensor film with arrays of hair-like flexible micropillars on the surface is presented to measure the temporal and spatial wall shear stress field in boundary layer flows. The sensor principle uses the pillar tip deflection in the viscous sublayer as a direct measure of the wall shear stress. The pillar images are recorded simultaneously as a grid of small bright spots by high-speed imaging of the illuminated sensor film. Two different ways of illumination were tested, one of which uses the fact that the transparent pillars act as optical microfibres, which guide the light to the pillar tips. The other method uses pillar tips which were reflective coated. The tip displacement field of the pillars is measured by image processing with subpixel accuracy. With a typical displacement resolution on the order of 0.2 μm, the minimum resolvable wall friction value is τw≈20 mPa. With smaller pillar structures than those used in this study, one can expect even smaller resolution limits.












Similar content being viewed by others

References
Bernard PS, Wallace JM (2002) Turbulent flow: analysis, measurement, and prediction. Wiley, New York
Brücker C, Spatz J, Schröder W (2004) Wall shear stress imaging in turbulent flows using microstructured surfaces with flexible micropillars. In: Proceedings of the 10th EUROMECH European turbulence conference (ETC 10), The Norwegian University of Science and Technology, Trondheim, Norway, 29 June–2 July 2004
Chen J, Fan Z, Zou J, Engel J, Liu C (2003) Two-dimensional micromachined flow sensor array for fluid mechanical studies. J Aerospace Eng 16(2):85–97
Czarske J, Büttner L, Razik T, Welling H (2001) Measurement of velocity gradients in boundary layers by a spatially resolving laser Doppler sensor. In: Proceedings of the SPIE’s annual meeting, conference 4448, optical diagnostics for fluids, solids, and combustion session micro optics, 29–31 July 2001, San Diego, California
Fernholz HH, Janke G, Schrober M, Wagner PM, Warnack D (1996) New developments and applications of skin-friction measuring techniques. Meas Sci Technol 7:1396–1409
Gharib M, Modarress D, Fourguette D, Wilson D (2002) Optical microsensors for fluid flow diagnostics. In: Proceedings of the 40th AIAA Aerospace sciences meeting and exhibit. Reno, Nevada, January 2002
Gibson A, Chernoray V, Löfdahl L (2004) Time-resolved wall shear stress measurements using MEMS. In: Proceedings of the XXI international congress of theoretical and applied mechanics (ICTAM 2004), Warsaw, Poland, 15–21 August 2004
Glassmaker NJ, Jagota A, Hui CY, Kim J (2004) Design of biomimetic fibrillar interfaces: 1. making contact. J R Soc Lond Interface 1:23–33
Khoo BC, Durst F (2002) Near wall measurements with hot-wires and hot-film probes require special care. Dantec Dynamics News, vol 9 no 4, available at http://www.dantecdynamics.com/applications/Fundamental%20Fluid/cta_Near%20wall%20measurements/
Löfdahl L, Gad-el-Hak M (1999) MEMS application in turbulence and flow control. Prog Aerospace Sci 35:101–203
Lötters JC, Olthuis W, Veltink PH, Bergveld P (1997) The mechanical properties of the rubber elastic polymer polydimethylsiloxane for sensor applications. J Micromech Microeng 7:145–147
Meinhart CD, Wereley ST (2003) The theory of diffraction-limited resolution in microparticle image velocimetry. Meas Sci Technol 14:1047–1053
Naughtona JW, Sheplak M (2002) Modern developments in shear-stress measurement. Prog Aerospace Sci 38:515–570
Osaki Y, Ohyama T, Yasuda T, Shimoyama I (2000) An air flow sensor modelled on wind receptor hairs of insects. In: Proceedings of the 13th annual international conference on micro electro mechanical systems (MEMS 2000), Miyazaki, Japan, January 2000, pp 531–536
O’Sullivan S, Nagle R, McEwen JA, Casey V (2003) Elastomer rubbers as deflection elements in pressure sensors: investigation of properties using a custom designed programmable elastomer test rig. J Phys D: Appl Phys 36:1910–1916
von Papen T, Buder U, Ngo HD, Obermeier E (2002) High resolution wall shear stress measurement using a MEMS surface fence sensor. In: Proceedings of the 16the European conference on solid-state transducers (Eurosensors XVI), 15–18 September 2002, Prague, Czech Republic, pp 744–747
Roos W, Roth A, Konle J, Presting H, Sackmann E, Spatz J (2003) Freely suspended actin cortex models on arrays of microfabricated pillars. Chem Phys Chem 4:872–876
Roy P, Rajfur Z, Pomorski P, Jacobson K (2002) Microscope-based techniques to study cell adhesion and migration. Nat Cell Biol 4(4):E91–E96
Rudko O (2001) Design of a low-frequency sound sensor inspired by insect sensory hairs. Masters thesis, Binghamton University, New York
Schmitz GJ, Brücker Ch, Jacobs P (2005) Manufacture of high-aspect ratio micro-hair sensor arrays. J Micromech Microeng (in press)
Shimozawa T, Kumagai T, Baba Y (1998) Structural scaling and functional design of the cercal wind-receptor hairs of cricket. J Comp Physiol A 183:171–186
Sturzebecher D, Anders S, Nitsche W (2001) The surface hot-wire as a means of measuring mean and fluctuating wall shear stresses. Exp Fluids 31(3):294–301
Timoshenko SP, Gere JM (1961) Theory of elastic instability, 2nd edn. McGraw-Hill, New York
van Baar JJ, Dijkstro M, Wiegerink RJ, Lammerink TSJ, Kijnen (2003) Fabrication of arrays of artificial hairs for complex flow pattern recognition. In Proceedings of the 2nd IEEE international conference on sensors, Toronto, Canada, October 2003, pp 22–24
Venier P, Maggs AC, Carlier MF, Pantaloni D (1994) Analysis of microtubule rigidity using hydrodynamic flow and thermal fluctuations. J Biol Chem 269:13353–13360
Volterra E, Zachmanoglou EC (1965) Dynamics of vibrations. Charles E. Merrill Books, Columbus, Ohio
Weeks B, Camarero J, Noy A, Miller A, Stanker L, De Joreo J (2003) A micro cantilever-based pathogen detector. In: Proceedings of the 2003 nanotechnology conference and trade show (Nanotech 2003), San Francisco, California, 23–27 February 2003
Acknowledgements
The authors gratefully acknowledge the support of this project by the Deutsche Forschungsgemeinschaft DFG under grant no. BR 1494/5-1.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Stokes’ drag force in an oscillating boundary layer flow
Unlike Oseen’s approximate quasi-steady solution, Stokes’ solution for a cylinder oscillating in a fluid accounts for oscillatory flow conditions and added mass effects. The drag force per unit length on the cylinder oscillating with velocity U(t)=U0sin(ωt) is:
The quantity ZS is the Stokes’ mechanical impedance and ζS is a phase shift, both of which are expressed by the following formulae:
To take into account the velocity profile in the boundary layer of the sensor film, we use Stokes’ solution for the boundary layer of an oscillating flow with U(t)=U0sin(ωt) at infinity above a flat plate yielding the following velocity profile:
with:
The actual force distribution on the pillars in the boundary layer is defined by the relative velocity u(z, t)−∂w/∂t, leading to the following expression of the force:
Appendix 2
Frequency response of the pillars in the boundary layer
The response of the pillars to a certain oscillating force F(z, t), which is due to the viscous drag of the fluid moving around the pillars, is described by the one-dimensional Euler–Bernoulli differential equation. Following elastic theory, the governing equation (GE) of the motion of a uniform, homogeneous, one-side clamped cantilever beam with density ρ, cross-sectional area \($ \ifmmode\expandafter\tilde\else\expandafter\~\fi{A},$\) Young’s modulus E and area moment of inertia I is given by:
The damping and added mass effects are included in the drag force fS(z, t), which is described by the Stokes’ solution, see Eq. 15. For the above defined cantilever beam, the necessary boundary conditions to solve Eq. 16 are w|(z=0, t)=0, ∂w/∂z|(z=0, t)=0 for the clamped end at z=0 and ∂2w/∂z2|(z=L, t)= 0, ∂3w/∂z3|(z=L, t)=0 for the free end.
For the frequency response in the form of transverse vibrations, we assume a synchronous motion, which implies that the solution w(z, t) is separable in its spatial and temporal components. A particular solution of separated variables in t and z, i.e. the mode vibration η(t) and the mode shape Φ(z), is chosen as given in Eq. 17. It can be shown that the general solution can be expressed as a summation of all particular solutions:
This solution procedure for Eq. 16 is called the normal mode expansion, in which the modes, i.e. the eigenfunctions, are obtained from the associated eigenvalue problem, i.e. the non-forced case. Then, Eq. 16 can be split into two equations for the time-dependent part η i (t) and for the spatial dependence Φ i (z):
The mode shapes Φi(z) are independent of the force approximation and can be determined from the non-forced case f(z, t)=0. Under the above constraints, the resulting mode shapes are determined (Volterra and Zachmanoglou 1965):
where λ i and \(\ifmmode\expandafter\bar\else\expandafter\=\fi{C}_{{\text{i}}} \) are integration constants determined from the boundary conditions. Note that only the first few modes of vibration have significantly large amplitudes. In a first approximation, only the first mode Φ1(z) is considered with λ1=1.875 and \( \ifmmode\expandafter\bar\else\expandafter\=\fi{C}_{1} = 0.734. \) In addition, since the system is analysed for the steady-state response, we assume a response with the same frequency dependence as the force in the form:
Plugging the expression of the force given in Eq. 15 and the mode vibration given by Eq. 21 into Eq. 18, together with the first mode shape in Eq. 20, one obtains the following analytical expression for the amplitude H1 and phase ϕ1 of η1(t):
with:
Finally, the deflection of the first-mode vibration of the beam in a steady-state response is given as:
and the tip deflection amplitude reads as:
Rights and permissions
About this article
Cite this article
Brücker, C., Spatz, J. & Schröder, W. Feasability study of wall shear stress imaging using microstructured surfaces with flexible micropillars. Exp Fluids 39, 464–474 (2005). https://doi.org/10.1007/s00348-005-1003-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-005-1003-7